Englisch
Englisch  Deutsch
Deutsch  Japanisch
Japanisch Fahrerloses Testsystem
Nehmen Sie den Fahrer aus dem Fahrzeug und testen Sie die Effizienz, Präzision und Wiederholbarkeit.
Nehmen Sie den Fahrer aus dem Fahrzeug und testen Sie die Effizienz, Präzision und Wiederholbarkeit.
Das fahrerlose Testsystem von AB Dynamics nutzt Fahrroboter und Spurführungstechnologie, um das Testfahrzeug mit einer präzisen Positions-, Geschwindigkeits- und Zeitsteuerung entlang einer vordefinierten Pfad zu führen. Dieses System ermöglicht verschiedene Testanwendungen, wie z. B. Fahrzeugdynamik und Dauerlauf- und Misuse Tests.
Kunden setzen fahrerlose Systeme in der Regel ein, um Fahrzeug-Lebensdauertests zu beschleunigen und die Verletzungsgefahr für ihre Testfahrer zu vermeiden. Der Roboter fährt mit präziser Spurführung und Geschwindigkeitssteuerung ohne Unterbrechung auch auf den schwierigsten Untergründen wie Schlaglöchern, rauem Beton, Gelände und Kopfsteinpflaster. Das fahrerlose Testsystem bewältigt sicher Anwendungen mit mehreren Fahrzeugen, sodass zwei Bediener mehr als fünf Fahrzeuge steuern können, was die Effizienz des Testgeländes weiter erhöht. Darüber hinaus werden fahrerlose Systeme auch für Misuse Tests eingesetzt, z. B. für wiederholte Kollisionen mit Sandbänken, Bordsteinen und tiefen Schlaglöchern. Durch die Entfernung des Menschen aus dem Testfahrzeug wird hier eine wesentlich höhere Genauigkeit und Sicherheit erreicht.

Das fahrerlose Testsystem besteht aus vier Hauptkomponenten: Fahrroboter, das Spurführungssystem, das Sicherheitssystem und die Steuerungssoftware.
Fahrroboter sind in das Testfahrzeug eingebaute Geräte zur Steuerung von Lenkung, Gaspedal, Bremse und Gängen. Sie ermöglichen es dem Testfahrzeug, mit hoher Genauigkeit und Wiederholbarkeit einem gewünschten Spur- und Geschwindigkeitsprofil zu folgen. Alternativ kann auch ein Flex-0-Controller verwendet werden, um das Fahrzeug über die CAN-Schnittstelle anzusteuern.
Das Spurführungssystem kommuniziert mit dem Fahrroboter und der Steuerungssoftware, um Rückmeldungen und Korrekturen zu liefern, sodass das Testfahrzeug komplexe Wege und Manöver wie Spurwechsel, Überholen und Notbremsungen ausführen kann.
Das Sicherheitssystem überwacht den Zustand und die Ausführung des Testfahrzeugs und des Fahrroboters. Es bietet auch eine ferngesteuerte Not-Aus-Funktion, die vom Bediener oder von der Steuerungssoftware aktiviert werden kann.
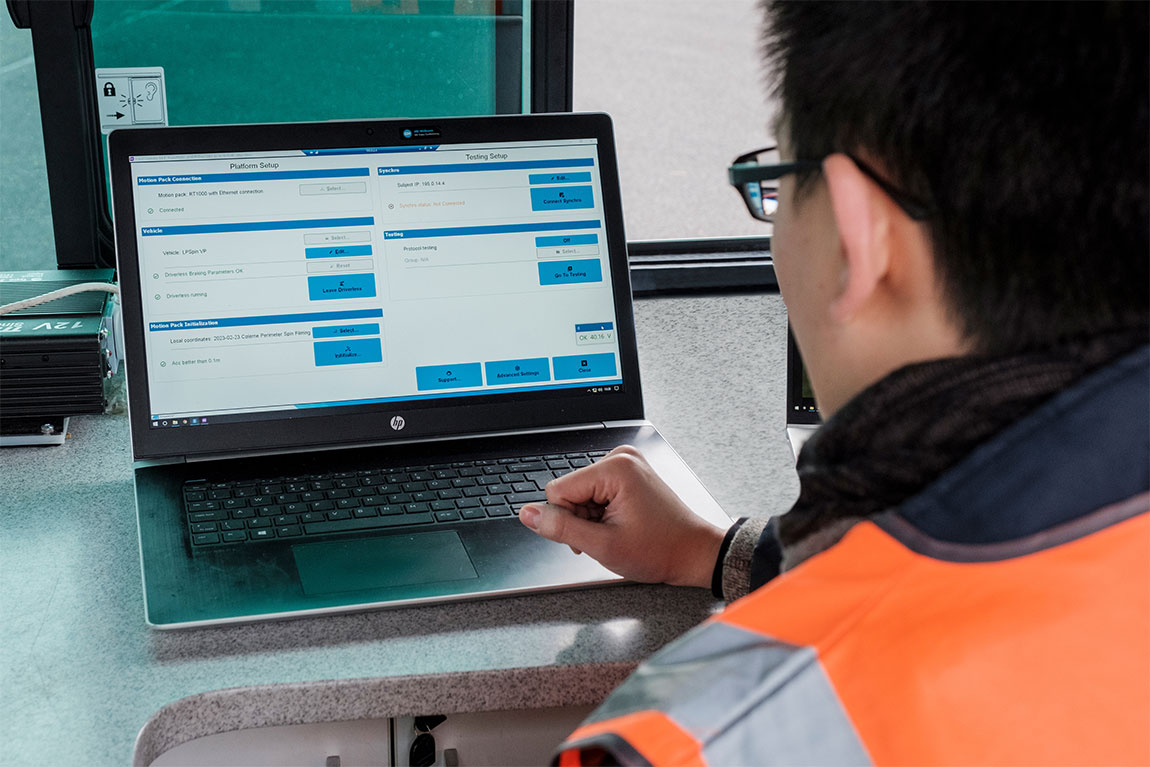
Die Steuerungssoftware läuft auf einem Laptop oder Tablet und bildet die Benutzeroberfläche des Systems. Diese Software ermöglicht es dem Benutzer, Testszenarien und Pfade zu erstellen, zu bearbeiten und auszuführen. Es zeigt auch den Echtzeitstatus sowie die Rückmeldungen des Testfahrzeugs und des Fahrroboters an.
"*" indicates required fields
Sie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenNotifications