Englisch
Englisch  Deutsch
Deutsch  Japanisch
Japanisch Fahrerloses Testsystem
Nehmen Sie den Fahrer aus dem Fahrzeug und testen Sie die Effizienz, Präzision und Wiederholbarkeit.
Nehmen Sie den Fahrer aus dem Fahrzeug und testen Sie die Effizienz, Präzision und Wiederholbarkeit.
Das fahrerlose Testsystem von AB Dynamics nutzt Fahrroboter und Spurführungstechnologie, um das Testfahrzeug mit einer präzisen Positions-, Geschwindigkeits- und Zeitsteuerung entlang einer vordefinierten Pfad zu führen. Dieses System ermöglicht verschiedene Testanwendungen, wie z. B. Fahrzeugdynamik und Dauerlauf- und Misuse Tests.
Kunden setzen fahrerlose Systeme in der Regel ein, um Fahrzeug-Lebensdauertests zu beschleunigen und die Verletzungsgefahr für ihre Testfahrer zu vermeiden. Der Roboter fährt mit präziser Spurführung und Geschwindigkeitssteuerung ohne Unterbrechung auch auf den schwierigsten Untergründen wie Schlaglöchern, rauem Beton, Gelände und Kopfsteinpflaster. Das fahrerlose Testsystem bewältigt sicher Anwendungen mit mehreren Fahrzeugen, sodass zwei Bediener mehr als fünf Fahrzeuge steuern können, was die Effizienz des Testgeländes weiter erhöht. Darüber hinaus werden fahrerlose Systeme auch für Misuse Tests eingesetzt, z. B. für wiederholte Kollisionen mit Sandbänken, Bordsteinen und tiefen Schlaglöchern. Durch die Entfernung des Menschen aus dem Testfahrzeug wird hier eine wesentlich höhere Genauigkeit und Sicherheit erreicht.

Das fahrerlose Testsystem besteht aus vier Hauptkomponenten: Fahrroboter, das Spurführungssystem, das Sicherheitssystem und die Steuerungssoftware.
Fahrroboter sind in das Testfahrzeug eingebaute Geräte zur Steuerung von Lenkung, Gaspedal, Bremse und Gängen. Sie ermöglichen es dem Testfahrzeug, mit hoher Genauigkeit und Wiederholbarkeit einem gewünschten Spur- und Geschwindigkeitsprofil zu folgen. Alternativ kann auch ein Flex-0-Controller verwendet werden, um das Fahrzeug über die CAN-Schnittstelle anzusteuern.
Das Spurführungssystem kommuniziert mit dem Fahrroboter und der Steuerungssoftware, um Rückmeldungen und Korrekturen zu liefern, sodass das Testfahrzeug komplexe Wege und Manöver wie Spurwechsel, Überholen und Notbremsungen ausführen kann.
Das Sicherheitssystem überwacht den Zustand und die Ausführung des Testfahrzeugs und des Fahrroboters. Es bietet auch eine ferngesteuerte Not-Aus-Funktion, die vom Bediener oder von der Steuerungssoftware aktiviert werden kann.
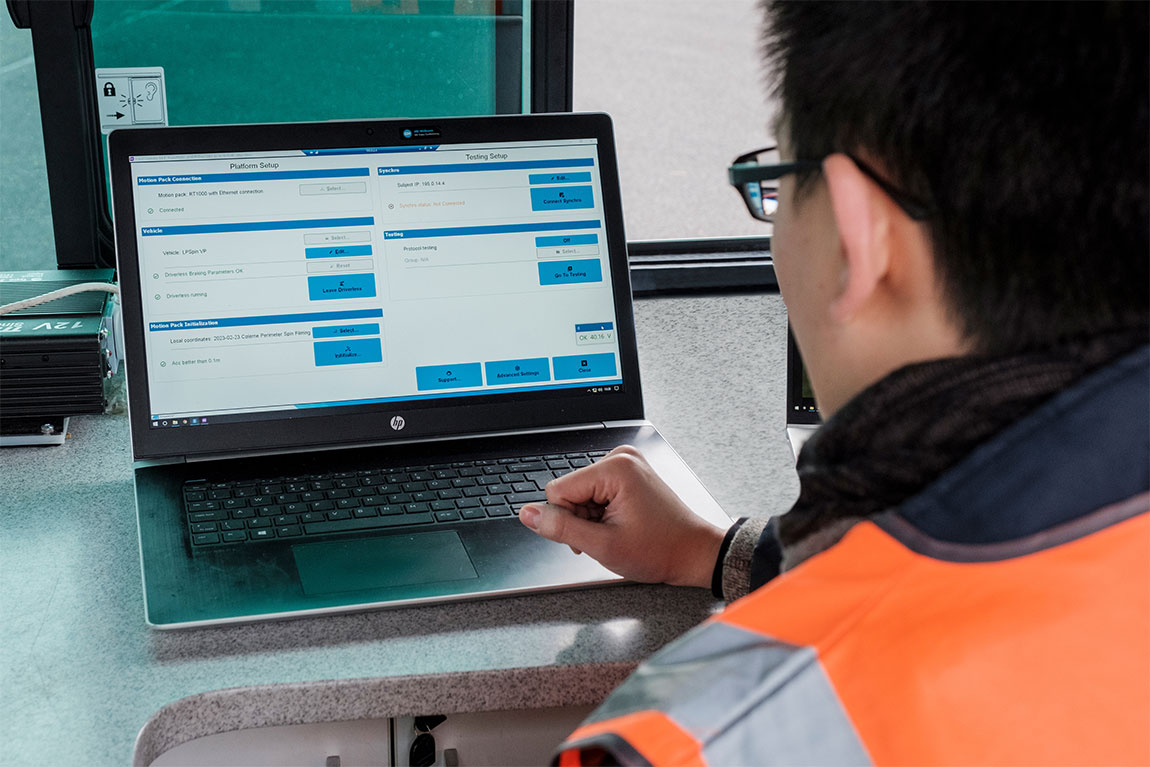
Die Steuerungssoftware läuft auf einem Laptop oder Tablet und bildet die Benutzeroberfläche des Systems. Diese Software ermöglicht es dem Benutzer, Testszenarien und Pfade zu erstellen, zu bearbeiten und auszuführen. Es zeigt auch den Echtzeitstatus sowie die Rückmeldungen des Testfahrzeugs und des Fahrroboters an.
"*" indicates required fields
Der Gaspedalroboter AR 1 steuert entweder die Position des Gaspedals oder die Fahrzeuggeschwindigkeit und verwendet einen kompakten Drehantrieb, um das Gaspedal präzise und genau zu steuern.
Der Gaspedalroboter AR 1 ist so einstellbar, dass er in die meisten Fahrzeuge passt, sowohl in Rechts- als auch Linkslenker. Im eingebauten Zustand ist auch das normale Fahren durch einen Fahrer möglich. In Verbindung mit einem Lenkroboter und unserer Spurführungssoftware (Path Following) kann der AR 1 das Geschwindigkeitsprofil eines menschlichen Fahrers nachbilden, z. B. bei Runden auf einer Strecke. Eine weitere typische Anwendung ist die Steuerung der Eingangsgeschwindigkeit bei einem Lenk- oder Bremstest mit Gasrücknahme während des Tests. Wie unsere anderen Pedalroboter lässt sich auch der AR 1 ganz einfach mit unserer RC-Software konfigurieren und steuern, die vordefinierte Vorlagen für C-NCAP-, Euro-NCAP-, JNCAP-, NHTSA-Testszenarien und UN-Anforderungen sowie maßgeschneiderte Optionen bietet.
Der Gaspedalroboter AR 1 steuert die Gaspedalstellung und die Fahrzeuggeschwindigkeit mit einer maximalen Kraft von 150 N.
"*" indicates required fields
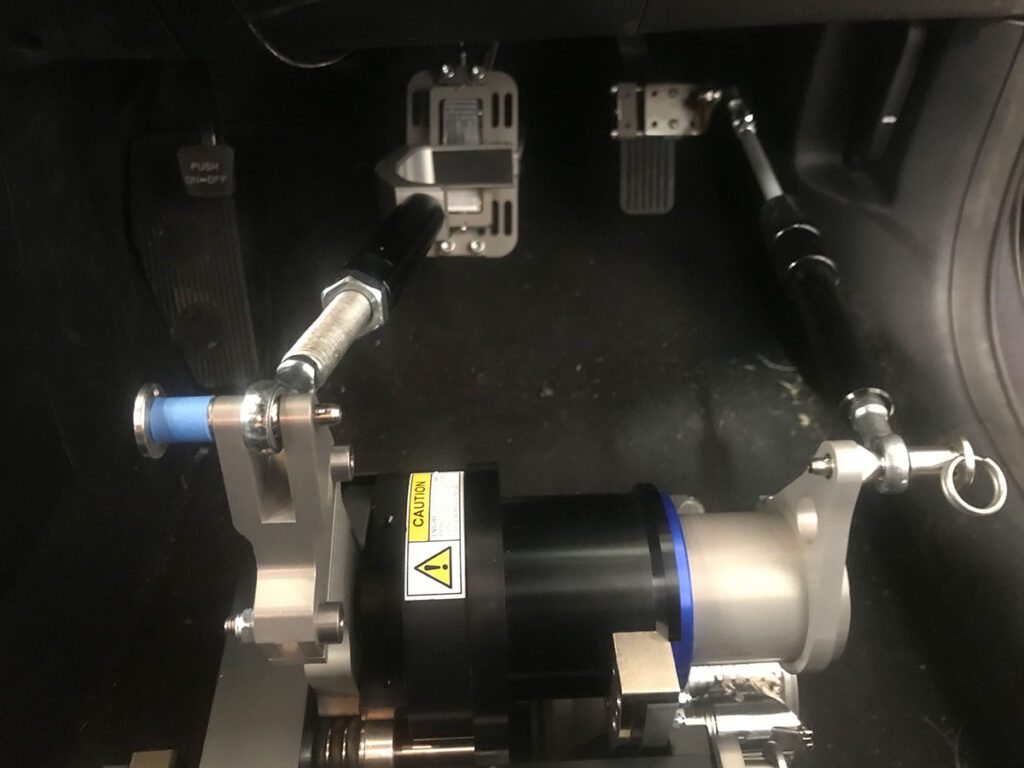
Unser Kupplungsroboter steuert das Kupplungspedals eines Fahrzeugs mit hoher Präzision und Wiederholgenauigkeit, in enger Abstimmung mit dem Gaspedal und der Gangschaltung. Er ist Teil unserer Lösung für die Automatisierung von Gangwechseln und Anfahrvorgängen in Fahrzeugen mit Schaltgetriebe.
Unser Kupplungsroboter wurde als Ergänzung zu den CBAR Pedalrobotern entwickelt und bietet eine präzise Steuerung von Position und Pedalgeschwindigkeit mit vollständig anpassbaren Kupplungs- und Auskupplungsprofilen. Dieses fortschrittliche System ermöglicht es, Fahrzeuge mit manueller Schaltung robotergesteuert zu betreiben, für Anwendungen sowohl mit als auch ohne Fahrer. Der Kupplungsroboter liefert eine präzise Servosteuerung für genaue und wiederholbare Positionseingaben.
Er lässt sich nahtlos mit dem Schaltroboter für manuelle Getriebe integrieren und ermöglicht es dem Fahrzeug, aus dem Stand zu beschleunigen, anzuhalten und rückwärts zu fahren. Die Manöver werden mit der Robotersteuerungssoftware RC (Robot Controller) programmiert, die die Planung, Durchführung und Überprüfung von Fahrversuchen mit unseren Fahrrobotern nahtlos steuert und verwaltet. Mit der RC-Software kann der Roboter die Schleifpunkte der Kupplung und die Anfahrgeschwindigkeit leicht erlernen. Dies kann mit den CAN-Drehzahl-Rückmeldungen kombiniert werden, um eine hervorragende, gleichmäßige Steuerung zu erreichen.
Der Kupplungsroboter lässt sich vollständig mit unseren anderen Pedalrobotern integrieren und bietet anpassbare Geschwindigkeitsprofile.
Drehantrieb
Gleichstrommotorantrieb mit integriertem Getriebe
Wird am CBAR montiert
Kann über einen BR-Montagerahmen auf dem Sitz auch als Einzelgerät verwendet werden
350 N Spitzenkraft
650 mm/s (bei bis zu 200 N) maximale Geschwindigkeit
"*" indicates required fields
Der CBAR 600 ist ein kompakter und vielseitiger Roboter, der Präzision, Zuverlässigkeit und Effizienz bietet.
Mit seinem kompakten Aktuator kann der kombinierte Brems- und Gaspedalroboter CBAR 600 präzise, zuverlässige und effiziente Tests zur Steuerung der Geschwindigkeitvon Fahrzeugen durchführen. Ganz gleich, ob Sie die NCAP-Anforderungen erfüllen müssen, das Pedalgefühl bewerten wollen oder neue Möglichkeiten bei fahrerlosen Tests erforschen: Der CBAR 600 bietet eine präzise Steuerung der Fahrzeuggeschwindigkeit und ist damit die perfekte Wahl für alle Tests, die eine genaue, wiederholbare Geschwindigkeitssteuerung erfordern.
Der CBAR 600 ist steuerbar, vielseitig und benutzerfreundlich und kann die Brems- oder Gaspedale der meisten Fahrzeuge schnell betätigen. Mit unserer RC-Software, die vordefinierte Vorlagen für C-NCAP-, Euro-NCAP-, JNCAP-, NHTSA-Testszenarien und UN-Anforderungen sowie maßgeschneiderte Optionen bietet, ist er einfach zu konfigurieren und zu steuern. Der CBAR 600 kann auch für fahrerlose Tests aufgerüstet werden, und in Kombination mit einem unserer Lenkroboter eignet er sich ideal für Spurführungs-, Fahrdynamik- oder Bremsassistententests.
Der CBAR 600 steuert sowohl das Brems- als auch das Gaspedal mit genügend Leistung, um typische Fahrpedaleingaben nachzubilden. Außerdem kann er für fahrerlose Tests aufgerüstet werden.
"*" indicates required fields
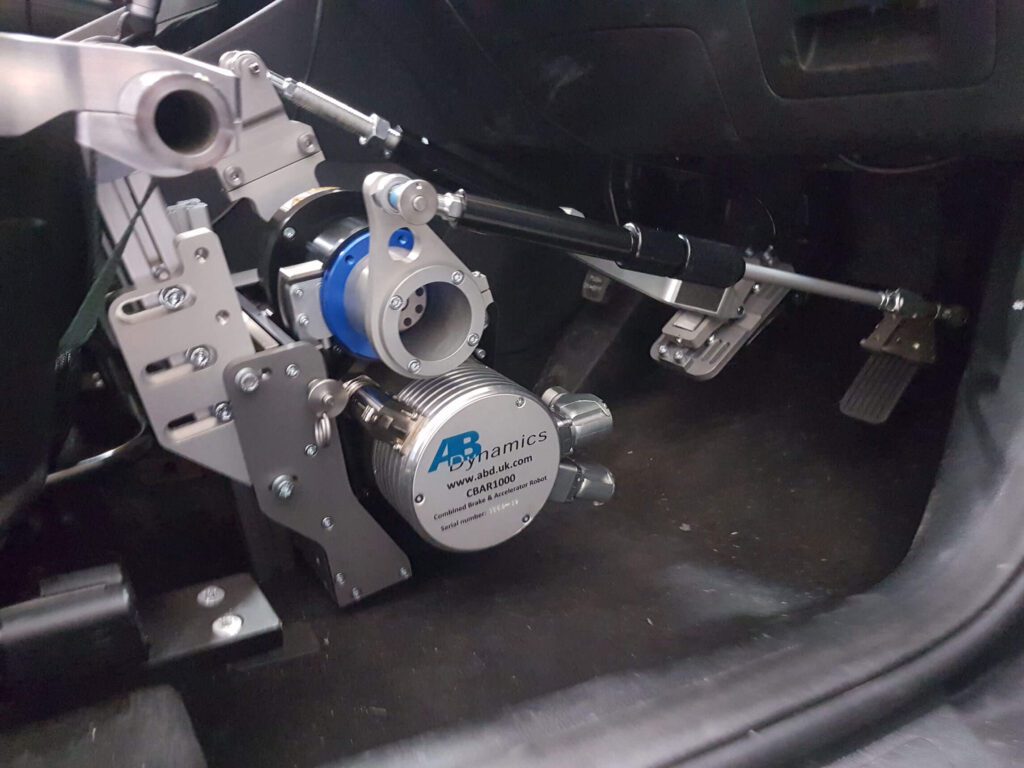
Der CBAR 1000 ist ein leistungsstarker und zuverlässiger Roboter für verschiedene Brems- und Geschwindigkeitssteuerungstests.
Wenn mehr Bremskraft erforderlich ist, bietet der kombinierte Brems- und Gaspedalroboter CBAR 1000 – der große Bruder des CBAR 600 – genügend Leistung für aggressive Bremstests. Der CBAR 1000 wurde speziell für Hochleistungsfahrzeuge entwickelt, die hohe Bremskräfte und hohe Pedalgeschwindigkeiten erfordern. Er liefert eine Bremskraft von bis zu 1300 N und eine Pedalgeschwindigkeit von 800 mm/s. Mit einer optionalen Sicherheitsbremse kann der CBAR 1000 auch für fahrerlose Anwendungen eingesetzt werden.
Dieser Pedalroboter eignet sich auch für die allgemeine Geschwindigkeitssteuerung und ADAS-Tests. Wie der CBAR 600 verfügt auch der CBAR 1000 über einen bodenmontierten Aktuator und kann mit unserer RC-Software, die vordefinierte Vorlagen für C-NCAP-, Euro-NCAP-, JNCAP- und NHTSA-Testszenarien und UN-Anforderungen sowie maßgeschneiderte Optionen bietet, einfach konfiguriert und gesteuert werden. Diese Funktionen reduzieren nicht nur den Aufwand für den Bediener, sondern bieten auch mehr Flexibilität und Kontrolle über die Prüfkriterien.
Mit einer maximalen Bremskraft von 1300 N ist der CBAR 1000 ein leistungsstarker Roboter für Bremstests und die Geschwindigkeitssteuerung.
"*" indicates required fields
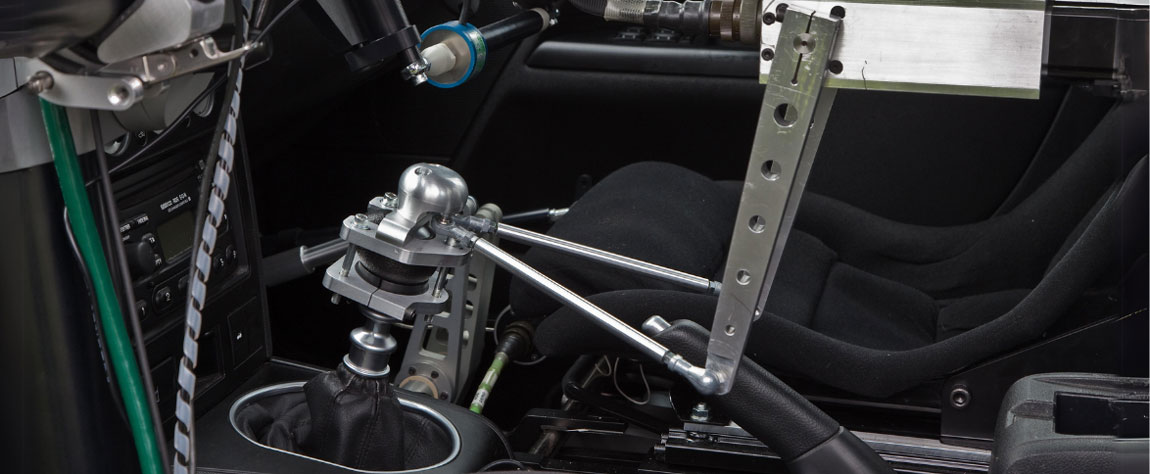
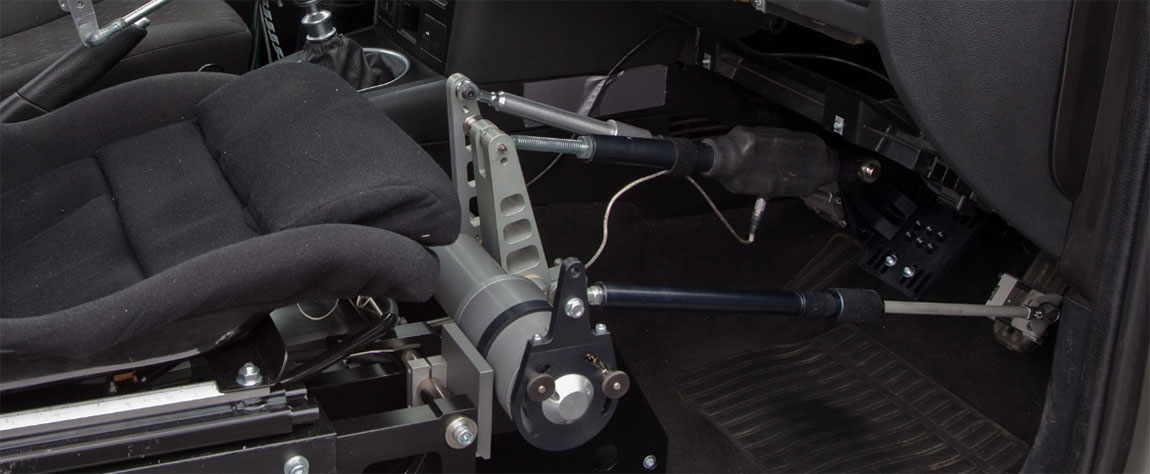
Der Schaltroboter wurde für die automatisierte Fernsteuerung von Schalt- und Automatikgetrieben entwickelt und erweitert die Fähigkeiten Ihrer Fahrroboter, indem er neue Testmöglichkeiten schafft.
Der Schaltroboter ermöglicht die automatisierte Steuerung der Gangschaltung eines Fahrzeugs und erweitert damit die Möglichkeiten der fahrerlosen Fahrzeugsteuerung. Der Roboter kann für Fahrzeuge mit Automatik- und Schaltgetrieben eingesetzt werden und in Vorwärts,- Rückwärts- und einzelne Gänge schalten. Er kann auch für Tests mit einem menschlichen Fahrer an Bord oder für Labortests verwendet werden. Unsere RC-Software koordiniert automatisch die Bewegungen der Kupplungs-, Schalt- und Gaspedalaktuatoren, um sanfte Schaltvorgänge zu ermöglichen. Bei Fahrzeugen mit Schaltgetriebe kann er entweder als Pseudo-Automatik dienen, die den Gang je nach Geschwindigkeit und Gaspedalstellung wechselt, oder er kann einer festgelegten Gangsequenz folgen.
Da der Schaltroboter sowohl Schalt- als auch ein Automatikgetriebe betätigen kann, können fahrerlose Roboter noch mehr Arbeit für Sie übernehmen und realistischere Testzyklen durchführen. Beispiele für die Anwendung von Schaltrobotern sind etwa das Testen der Auswirkungen des Rückwärtsfahrens in ein Schlagloch oder andere Hindernisse (missbräuchliche Nutzung bei Rückwärtsfahrt), das Testen der Haltbarkeit von Getriebe und Kupplung durch wiederholtes Rückwärtsfahren und Wenden an einer Steigung (Einfahrtstest) sowie das Testen von Fahrerassistenzsystemen (ADAS) von Fahrzeugen mit Handschaltung, die einem vorgegebenen Geschwindigkeitsprofil folgen müssen. Durch den Einsatz von Schaltrobotern können Sie menschliche Eingriffe und Fehler in Ihrem Testprozess reduzieren und realistischere und zuverlässigere Ergebnisse erzielen.

Der Schaltroboter ist einfach zu bedienen und ermöglicht gleichzeitig die Erstellung und Durchführung komplexer Testszenarien mit unübertroffener Genauigkeit.
*Anmerkung: Der Weg wird in der Regel durch den Winkel des Kugelgelenks begrenzt. Bei Fahrzeugen, bei denen die Winkelbewegung des Schalthebels geringer ist, können größere lineare Wege ermöglicht werden
"*" indicates required fields
Sie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr Informationen