Englisch
Englisch  Deutsch
Deutsch  Japanisch
Japanisch Spurführung (Path Following)
Unser Spurführungsmodul erweitert die Fähigkeiten von Fahrrobotern durch Präzision und Genauigkeit.
Unser Spurführungsmodul erweitert die Fähigkeiten von Fahrrobotern durch Präzision und Genauigkeit.
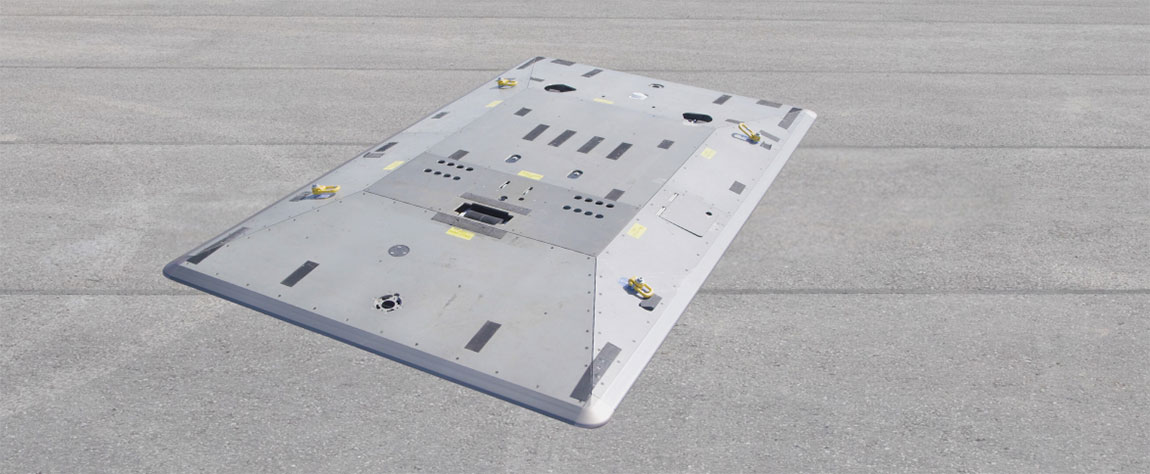
Das optionale AB Dynamics Spurführungsmodul (Path Following) ist eine signifikante Erweiterung der Fähigkeiten unserer Fahrroboter und ADAS-Plattformen. Das Modul führt unsere robotergesteuerten Fahrzeuge und ADAS-Plattformen mithilfe der in ihnen verbauten GNSS-Trägheitsnavigationssysteme mit außergewöhnlicher Genauigkeit und Wiederholbarkeit auf einer vordefinierten Spur. Der neueste Spurführungsalgorithmus beruht auf über 20 Jahren Erfahrung und wurde bereits für eine Vielzahl von Hochleistungstests eingesetzt, darunter stationäre Kurvenfahrten, doppelte Spurwechsel, komplette Runden auf der Rennstrecke von Silverstone und ein Hochgeschwindigkeits- und Präzisions-Crashtest für NASCAR.
Die AB Dynamics Spurführungssoftware nutzt die Rückmeldungen von GNSS-Trägheitsnavigationssystemen, um die Lenkung des Fahrzeugs oder der ADAS-Plattform in Echtzeit zu korrigieren und das Fahrzeug bzw. die Plattform selbst bei hohen Geschwindigkeiten und starken Querbeschleunigungen präzise auf dem gewünschten Weg zu führen.
Kann für kurze Tests, wie den ISO-Spurwechsel, und für längere Tests, wie mehrere Runden auf einem Dauerlaufkurs, verwendet werden
Bietet erhebliche Verbesserungen bei der Genauigkeit und Wiederholbarkeit von Fahrzeugprüfungen und führt so zu Kosten- und Zeiteinsparungen
Seitliche Positionsgenauigkeit bis zu 2 cm oder besser (in einer geraden Linie).
Kann auf jeder geeigneten Teststrecke verwendet werden, ohne dass eine Änderung der Streckenoberfläche erforderlich ist
Sicherer und zuverlässiger Einsatz bei Geschwindigkeiten von über 200 km/h
Bewahrt die Stabilität durch präzise Lenkung auch bei Übersteuerung
Synchronisation mehrerer Fahrzeuge auf komplexen Spuren mithilfe der GNSS-Zeit
Die Software ist in Modulen erhältlich, die jeweils auf eine bestimmte Art von Prüfung zugeschnitten sind
Kompatibel mit den wichtigsten IMU-Anbietern wie OxTS, GeneSys und Racelogic
"*" indicates required fields
Die Kernanwendung, die allen unseren Lösungen für Fahrversuche zugrunde liegt.
Die Robotersteuerungssoftware RC (Robot Controller) ist die Kernanwendung der AB Dynamics Track Applications Suite, die die Planung, Durchführung und Überprüfung von Fahrversuchen für unsere gesamte Palette an Fahrrobotern und ADAS-Testobjekten steuert und verwaltet. Mit dieser Suite können Benutzer eine breite Palette anpassbarer und vordefinierter Tests durchführen, von einfachen Sinus-Dwell-Manövern bis hin zu komplexen ADAS-Szenarien. Dank ihrer Flexibilität eignet sich die Software für eine Vielzahl von Fahrversuchen und ist ein wesentlicher Bestandteil unseres Produkt-Ökosystems. Zu den neuesten Funktionen von RC gehört eine Bibliothek mit vorkonfigurierten Euro-NCAP-Testszenarien, die über 150 der neuesten Testfälle unterstützt.
Entdecken Sie die dynamischen Möglichkeiten der Track Applications Suite. Alle Anwendung und Tool wurden speziell dafür entwickelt, die Präzision zu erhöhen, Arbeitsabläufe zu optimieren und eine beispiellose Kontrolle in Ihrer Testumgebung zu ermöglichen.
Der Szenariogenerator (Scenario Generator) ermöglicht die einfache Programmierung von Testszenarien, die gleichzeitige Planung von Fahrspuren und Ereignissen für mehrere Fahrzeuge und eine integrierte Szenario-Wiedergabefunktion zur Visualisierung von Interaktionen zwischen Spuren und Testobjekten.
Synchro ist eine optionale, erweiterte Steuerungsfunktion für Tests mit mehreren Objekten. Synchro koordiniert bis zu 16 Testobjekte und stellt sicher, dass das Testfahrzeug und andere ADAS-Targets während des gesamten Szenarios synchronisiert sind, selbst bei unterschiedlichen Geschwindigkeiten. Dies gewährleistet einen reibungslosen und effizienten Prüfprozess.
Spezialgruppen (Special Groups), ein Tool in RC, ist eine Bibliothek mit vorkonfigurierten Testgruppen, die Testanforderungen von Euro NCAP, C-NCAP, UN, NHTSA und JNCAP abdecken.
Das Nachbearbeitungstool (Post Processor) für Spezialgruppen in RC liefert automatisch und ohne Benutzereingabe Echtzeit-Ergebnisse und zeigt an, ob Tests bestanden wurden oder nicht. Das ermöglicht sofortige Rückmeldungen während der Tests. Außerdem erstellt er detaillierte Berichte über die einzelnen Tests.
AB Grapher ist eine eigenständige Anwendung, die den Überprüfungsprozess während der Testausführung durch parallele Datenanalysen verbessert. AB Grapher bietet eine umfassende Liste von Datenkanälen für die Darstellung mit konfigurierbaren Funktionen wie Mehrachsen-Darstellung, Filterung und Überlagerung. Damit ist er ein vielseitiges Tool für eine tiefgehende Datenvisualisierung und -analyse.
"*" indicates required fields
Koordinierung und Synchronisierung mehrerer Testobjekte für eine unübertroffene Testeffizienz.
Synchro ist unsere patentierte Kommunikationssprache für die Steuerung und zeitlichen Koordinierung der Bewegungen von Testobjekten. Sie nutzt unser zuverlässiges Funktelemetriesystem TrackFi PowerMesh zusammen mit unserer fortschrittlichen Robotersteuerungssoftware (Robot Controller), um eine perfekte Synchronisierung mehrerer Objekte zu gewährleisten – selbst auf komplexen Spuren und bei unterschiedlichen Geschwindigkeiten.
Synchro erfasst in Echtzeit Fahrzeug-zu-Objekt-Daten zwischen einem Testfahrzeug und anderen Objekten. So können beliebige Kombinationen von Systemen (robotergesteuerte Fahrzeuge, ADAS-Plattformen und fahrerlose Fahrzeuge) koordiniert und mit dem Testfahrzeug synchronisiert werden. Synchro ist in den Varianten Lite oder Full erhältlich und ermöglicht die präzise und wiederholbare Durchführung jedes Laufs, was die Effizienz von Fahrversuchen erheblich steigert.
Synchro bietet eine gemeinsame Schnittstelle für alle Fahrversuchssysteme und ermöglicht die Synchronisierung von bis zu 16 Objekten, die Integration und Kompatibilität mit den wichtigsten GNSS-/IMU-Anbietern und die multidirektionale Steuerung für komplexe Verkehrsszenarien – alles Funktion, die zu effizienten und präzisen Fahrversuchen beitragen.
Eine gemeinsame Schnittstelle für alle Fahrversuchssysteme von AB Dynamics
Synchronisierung für bis zu 16 Objekten
Integration und Kompatibilität mit wichtigen IMU-Anbietern wie OxTS, GeneSys und Racelogic
Aufzeichnung von bis zu 20 Fahrzeug-zu-Objekt-Synchro-Datenkanälen
Kontrolliert den Längsbereich mit optionaler Driftkorrekturlenkung
Auslösung von Ereignissen mit einer beliebigen Kombination von Synchro-Datenkanälen
Multidirektionale synchronisierte Steuerung für komplexe Verkehrsszenarien
Schnittstelle mit RT Range und ADMA Delta
Synchro Lite ermöglicht eine einfache ausgelöste Steuerung mit nur einer IMU im Testfahrzeug
"*" indicates required fields
Verbesserte Sicherheit, Überwachung und Steuerung des Verkehrs auf dem Testgelände.
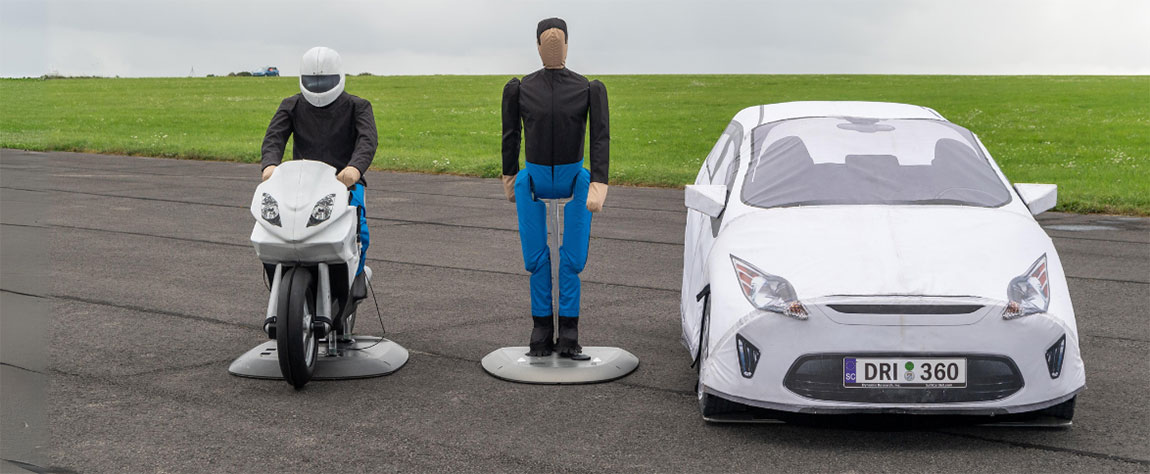
Ground Traffic Control (GTC) verwaltet komplexe Testszenarien durch die zentrale Überwachung, Steuerung und Koordinierung des Verkehrs auf der Teststrecke, einschließlich VRU-Plattformen, GSTs sowie fahrerloser und von Menschen gesteuerter Fahrzeuge.
Durch ihre Vielseitigkeit ist diese Software ideal für eine Vielzahl von Fahrversuch-Anwendungen, z. B. für Dauerlauf- und missbräuchliche Nutzungstests sowie für Tests von Autobahnszenarien mit mehreren Fahrzeugen. Um die Sicherheit in gemischten Verkehrsszenarien zu gewährleisten, ist das System mit einer Kollisionserkennung und -vermeidung ausgestattet, die robotergesteuerte Fahrzeuge abbremst und menschliche Fahrer warnt. GTC verbessert die Produktivität und die Zusammenarbeit durch eine anpassbare Benutzeroberfläche, die Unterstützung mehrerer Bildschirme und rollenbasierten Zugriff.
GTC ist ein revolutionäres System für die Verwaltung und Umsetzung fahrerloser Anwendungen für Dauerlauf- und missbräuchliche Nutzungstests sowie komplexer Multi-Fahrzeug-Testszenarien. Zu den Hauptfunktionen gehören:
Echtzeit-Überwachung von Fahrzeugen und anderen Testobjekten von mobilen und festen Basisstationen aus
Überwachung von Position, Kurs und Geschwindigkeit des Fahrzeugs durch das GNSS-Kollisionserkennungssystem, um Kollisionen automatisch zu vermeiden
Einfache Einrichtung von Geofencing-Bereichen, die so angepasst werden können, dass sie ein bestimmtes Fahrzeugverhalten innerhalb der virtuellen Grenzen auslösen
Unterstützt mehrere Benutzer mit Bediener- und Anzeigerechten
Ideal für fahrerlose Dauerlauf- und missbräuchliche Nutzungstests sowie komplexe Schwarmtests mit mehreren Fahrzeugen
Kompatibel mit AB Dynamics Systemen wie Fahrrobotern, Flex-0, LaunchPad und GST Produkten
"*" indicates required fields