Englisch
Englisch  Deutsch
Deutsch  Japanisch
Japanisch SR 15
Ein kompakter und vielseitiger Lenkroboter, der leicht in jedes Fahrzeug eingebaut werden kann, ohne den Airbag entfernen zu müssen.


Ein kompakter und vielseitiger Lenkroboter, der leicht in jedes Fahrzeug eingebaut werden kann, ohne den Airbag entfernen zu müssen.
Der SR 15 ist der kostengünstigste Lenkroboter in unserer Produktpalette und eine effektive Option für den Einsatz mehrerer robotergesteuerter Fahrzeuge, z. B. bei fahrerlosen Anwendungen mit mehreren Fahrzeugen. Der SR 15 lässt sich leicht am Lenkrad eines Fahrzeugs befestigen, ohne dass der Airbag ausgebaut werden muss. Außerdem zeichnet er sich durch eine geringe Reibung aus, was ihn zu einer sehr beliebten Wahl für ADAS- und Dauerlauftests macht.
Der SR 15 ist eine vielseitige, wirtschaftliche und zuverlässige Wahl für Dauerlauf-, Misuse- und ADAS-Tests.
"*" indicates required fields
Der Lenkroboter Halo profitiert von mehr als 20 Jahren Erfahrung in der Entwicklung von Robotern und unterstützt eine Vielzahl von Lenktests mit hoher Genauigkeit und Wiederholbarkeit.
Der Halo ist unser bisher flexibelster und vielseitigster Lenkroboter. Sein einzigartiges, patentiertes Design mit Direktantrieb und Hohlwelle ermöglicht die Montage, ohne dass der Airbag entfernt werden muss, was eine einfache Einrichtung und sichere Verwendung ermöglicht. Mit einem Lenkradkranz aus Kohlefaser und einem innovativen Wrap-Around-Design kann er ein Spitzendrehmoment von 90 Nm und eine Spitzendrehzahl von 2500 Grad pro Sekunde erreichen. Dies ermöglicht es dem Halo, präzise und kontrollierte Eingaben in das Lenksystem eines Fahrzeugs zu machen, wie es für eine Vielzahl von Tests erforderlich ist.
Die Manöver werden mit der Robotersteuerungssoftware (Robot Controller) programmiert, die die Planung, Durchführung und Überprüfung von Fahrversuchen mit unseren Fahrrobotern nahtlos steuert und verwaltet. Ganz gleich, ob es um transientes Fahrverhalten, ADAS-Prüfungen, gesetzlich vorgeschriebene Tests (Fishhook, Sinus-Dwell usw.), die Lenksystembewertung oder Dauerlauf- und missbräuchliche Nutzungstests geht: In Kombination mit unserer RC-Software ist der Halo allen Aufgaben gewachsen.
Der Halo ermöglicht ein breites Spektrum an Lenkeingaben mit hoher Präzision und Wiederholbarkeit und damit die Erfassung hochwertiger Daten.
"*" indicates required fields
Der CBAR 600 bietet die gleiche Bremsleistung wie der CBAR 600, aber in einem kompakteren Gehäuse. Damit ist er ideal für AEB- und andere ADAS-Tests.
Der kombinierte Brems- und Gaspedalroboter CBAR 600L ist eine Weiterentwicklung der Originalversion des CBAR 600 mit einem flacheren Aktuator für eine bessere Ergonomie des Fahrers. Mit einer kompakteren Grundfläche ist er für den Fahrer bequemer, insbesondere in Fahrzeugen mit niedrigeren Sitzpositionen.
Wie der CBAR 600 kann auch der CBAR 600L Fahrzeug-Geschwindigkeitssteuerungstests präzise, zuverlässig und effizient durchführen und lässt sich mit unserer RC-Software, die vordefinierte Vorlagen für C-NCAP-, Euro-NCAP-, JNCAP-, NHTSA-Testszenarien und UN-Anforderungen sowie maßgeschneiderte Optionen bietet, einfach konfigurieren und steuern. Diese Funktionen reduzieren nicht nur den Aufwand für den Bediener, sondern bieten auch mehr Flexibilität und Kontrolle über die Prüfkriterien.
Der CBAR 600L ist ein kompakter und flacher Roboter, der sowohl das Brems- als auch das Gaspedal eines Fahrzeugs präzise und gleichmäßiger Geschwindigkeit steuern kann.
"*" indicates required fields
Nehmen Sie den Fahrer aus dem Fahrzeug und testen Sie die Effizienz, Präzision und Wiederholbarkeit.
Das fahrerlose Testsystem von AB Dynamics nutzt Fahrroboter und Spurführungstechnologie, um das Testfahrzeug mit einer präzisen Positions-, Geschwindigkeits- und Zeitsteuerung entlang einer vordefinierten Pfad zu führen. Dieses System ermöglicht verschiedene Testanwendungen, wie z. B. Fahrzeugdynamik und Dauerlauf- und Misuse Tests.
Kunden setzen fahrerlose Systeme in der Regel ein, um Fahrzeug-Lebensdauertests zu beschleunigen und die Verletzungsgefahr für ihre Testfahrer zu vermeiden. Der Roboter fährt mit präziser Spurführung und Geschwindigkeitssteuerung ohne Unterbrechung auch auf den schwierigsten Untergründen wie Schlaglöchern, rauem Beton, Gelände und Kopfsteinpflaster. Das fahrerlose Testsystem bewältigt sicher Anwendungen mit mehreren Fahrzeugen, sodass zwei Bediener mehr als fünf Fahrzeuge steuern können, was die Effizienz des Testgeländes weiter erhöht. Darüber hinaus werden fahrerlose Systeme auch für Misuse Tests eingesetzt, z. B. für wiederholte Kollisionen mit Sandbänken, Bordsteinen und tiefen Schlaglöchern. Durch die Entfernung des Menschen aus dem Testfahrzeug wird hier eine wesentlich höhere Genauigkeit und Sicherheit erreicht.

Das fahrerlose Testsystem besteht aus vier Hauptkomponenten: Fahrroboter, das Spurführungssystem, das Sicherheitssystem und die Steuerungssoftware.
Fahrroboter sind in das Testfahrzeug eingebaute Geräte zur Steuerung von Lenkung, Gaspedal, Bremse und Gängen. Sie ermöglichen es dem Testfahrzeug, mit hoher Genauigkeit und Wiederholbarkeit einem gewünschten Spur- und Geschwindigkeitsprofil zu folgen. Alternativ kann auch ein Flex-0-Controller verwendet werden, um das Fahrzeug über die CAN-Schnittstelle anzusteuern.
Das Spurführungssystem kommuniziert mit dem Fahrroboter und der Steuerungssoftware, um Rückmeldungen und Korrekturen zu liefern, sodass das Testfahrzeug komplexe Wege und Manöver wie Spurwechsel, Überholen und Notbremsungen ausführen kann.
Das Sicherheitssystem überwacht den Zustand und die Ausführung des Testfahrzeugs und des Fahrroboters. Es bietet auch eine ferngesteuerte Not-Aus-Funktion, die vom Bediener oder von der Steuerungssoftware aktiviert werden kann.
Die Steuerungssoftware läuft auf einem Laptop oder Tablet und bildet die Benutzeroberfläche des Systems. Diese Software ermöglicht es dem Benutzer, Testszenarien und Pfade zu erstellen, zu bearbeiten und auszuführen. Es zeigt auch den Echtzeitstatus sowie die Rückmeldungen des Testfahrzeugs und des Fahrroboters an.
"*" indicates required fields
Unser Spurführungsmodul erweitert die Fähigkeiten von Fahrrobotern durch Präzision und Genauigkeit.
Das optionale AB Dynamics Spurführungsmodul (Path Following) ist eine signifikante Erweiterung der Fähigkeiten unserer Fahrroboter und ADAS-Plattformen. Das Modul führt unsere robotergesteuerten Fahrzeuge und ADAS-Plattformen mithilfe der in ihnen verbauten GNSS-Trägheitsnavigationssysteme mit außergewöhnlicher Genauigkeit und Wiederholbarkeit auf einer vordefinierten Spur. Der neueste Spurführungsalgorithmus beruht auf über 20 Jahren Erfahrung und wurde bereits für eine Vielzahl von Hochleistungstests eingesetzt, darunter stationäre Kurvenfahrten, doppelte Spurwechsel, komplette Runden auf der Rennstrecke von Silverstone und ein Hochgeschwindigkeits- und Präzisions-Crashtest für NASCAR.
Die AB Dynamics Spurführungssoftware nutzt die Rückmeldungen von GNSS-Trägheitsnavigationssystemen, um die Lenkung des Fahrzeugs oder der ADAS-Plattform in Echtzeit zu korrigieren und das Fahrzeug bzw. die Plattform selbst bei hohen Geschwindigkeiten und starken Querbeschleunigungen präzise auf dem gewünschten Weg zu führen.
Kann für kurze Tests, wie den ISO-Spurwechsel, und für längere Tests, wie mehrere Runden auf einem Dauerlaufkurs, verwendet werden
Bietet erhebliche Verbesserungen bei der Genauigkeit und Wiederholbarkeit von Fahrzeugprüfungen und führt so zu Kosten- und Zeiteinsparungen
Seitliche Positionsgenauigkeit bis zu 2 cm oder besser (in einer geraden Linie).
Kann auf jeder geeigneten Teststrecke verwendet werden, ohne dass eine Änderung der Streckenoberfläche erforderlich ist
Sicherer und zuverlässiger Einsatz bei Geschwindigkeiten von über 200 km/h
Bewahrt die Stabilität durch präzise Lenkung auch bei Übersteuerung
Synchronisation mehrerer Fahrzeuge auf komplexen Spuren mithilfe der GNSS-Zeit
Die Software ist in Modulen erhältlich, die jeweils auf eine bestimmte Art von Prüfung zugeschnitten sind
Kompatibel mit den wichtigsten IMU-Anbietern wie OxTS, GeneSys und Racelogic
"*" indicates required fields
Die Kernanwendung, die allen unseren Lösungen für Fahrversuche zugrunde liegt.
Die Robotersteuerungssoftware RC (Robot Controller) ist die Kernanwendung der AB Dynamics Track Applications Suite, die die Planung, Durchführung und Überprüfung von Fahrversuchen für unsere gesamte Palette an Fahrrobotern und ADAS-Testobjekten steuert und verwaltet. Mit dieser Suite können Benutzer eine breite Palette anpassbarer und vordefinierter Tests durchführen, von einfachen Sinus-Dwell-Manövern bis hin zu komplexen ADAS-Szenarien. Dank ihrer Flexibilität eignet sich die Software für eine Vielzahl von Fahrversuchen und ist ein wesentlicher Bestandteil unseres Produkt-Ökosystems. Zu den neuesten Funktionen von RC gehört eine Bibliothek mit vorkonfigurierten Euro-NCAP-Testszenarien, die über 150 der neuesten Testfälle unterstützt.
Entdecken Sie die dynamischen Möglichkeiten der Track Applications Suite. Alle Anwendung und Tool wurden speziell dafür entwickelt, die Präzision zu erhöhen, Arbeitsabläufe zu optimieren und eine beispiellose Kontrolle in Ihrer Testumgebung zu ermöglichen.
Der Szenariogenerator (Scenario Generator) ermöglicht die einfache Programmierung von Testszenarien, die gleichzeitige Planung von Fahrspuren und Ereignissen für mehrere Fahrzeuge und eine integrierte Szenario-Wiedergabefunktion zur Visualisierung von Interaktionen zwischen Spuren und Testobjekten.
Synchro ist eine optionale, erweiterte Steuerungsfunktion für Tests mit mehreren Objekten. Synchro koordiniert bis zu 16 Testobjekte und stellt sicher, dass das Testfahrzeug und andere ADAS-Targets während des gesamten Szenarios synchronisiert sind, selbst bei unterschiedlichen Geschwindigkeiten. Dies gewährleistet einen reibungslosen und effizienten Prüfprozess.
Spezialgruppen (Special Groups), ein Tool in RC, ist eine Bibliothek mit vorkonfigurierten Testgruppen, die Testanforderungen von Euro NCAP, C-NCAP, UN, NHTSA und JNCAP abdecken.
Das Nachbearbeitungstool (Post Processor) für Spezialgruppen in RC liefert automatisch und ohne Benutzereingabe Echtzeit-Ergebnisse und zeigt an, ob Tests bestanden wurden oder nicht. Das ermöglicht sofortige Rückmeldungen während der Tests. Außerdem erstellt er detaillierte Berichte über die einzelnen Tests.
AB Grapher ist eine eigenständige Anwendung, die den Überprüfungsprozess während der Testausführung durch parallele Datenanalysen verbessert. AB Grapher bietet eine umfassende Liste von Datenkanälen für die Darstellung mit konfigurierbaren Funktionen wie Mehrachsen-Darstellung, Filterung und Überlagerung. Damit ist er ein vielseitiges Tool für eine tiefgehende Datenvisualisierung und -analyse.
"*" indicates required fields
Koordinierung und Synchronisierung mehrerer Testobjekte für eine unübertroffene Testeffizienz.
Synchro ist unsere patentierte Kommunikationssprache für die Steuerung und zeitlichen Koordinierung der Bewegungen von Testobjekten. Sie nutzt unser zuverlässiges Funktelemetriesystem TrackFi PowerMesh zusammen mit unserer fortschrittlichen Robotersteuerungssoftware (Robot Controller), um eine perfekte Synchronisierung mehrerer Objekte zu gewährleisten – selbst auf komplexen Spuren und bei unterschiedlichen Geschwindigkeiten.
Synchro erfasst in Echtzeit Fahrzeug-zu-Objekt-Daten zwischen einem Testfahrzeug und anderen Objekten. So können beliebige Kombinationen von Systemen (robotergesteuerte Fahrzeuge, ADAS-Plattformen und fahrerlose Fahrzeuge) koordiniert und mit dem Testfahrzeug synchronisiert werden. Synchro ist in den Varianten Lite oder Full erhältlich und ermöglicht die präzise und wiederholbare Durchführung jedes Laufs, was die Effizienz von Fahrversuchen erheblich steigert.
Synchro bietet eine gemeinsame Schnittstelle für alle Fahrversuchssysteme und ermöglicht die Synchronisierung von bis zu 16 Objekten, die Integration und Kompatibilität mit den wichtigsten GNSS-/IMU-Anbietern und die multidirektionale Steuerung für komplexe Verkehrsszenarien – alles Funktion, die zu effizienten und präzisen Fahrversuchen beitragen.
Eine gemeinsame Schnittstelle für alle Fahrversuchssysteme von AB Dynamics
Synchronisierung für bis zu 16 Objekten
Integration und Kompatibilität mit wichtigen IMU-Anbietern wie OxTS, GeneSys und Racelogic
Aufzeichnung von bis zu 20 Fahrzeug-zu-Objekt-Synchro-Datenkanälen
Kontrolliert den Längsbereich mit optionaler Driftkorrekturlenkung
Auslösung von Ereignissen mit einer beliebigen Kombination von Synchro-Datenkanälen
Multidirektionale synchronisierte Steuerung für komplexe Verkehrsszenarien
Schnittstelle mit RT Range und ADMA Delta
Synchro Lite ermöglicht eine einfache ausgelöste Steuerung mit nur einer IMU im Testfahrzeug
"*" indicates required fields
Verbesserte Sicherheit, Überwachung und Steuerung des Verkehrs auf dem Testgelände.
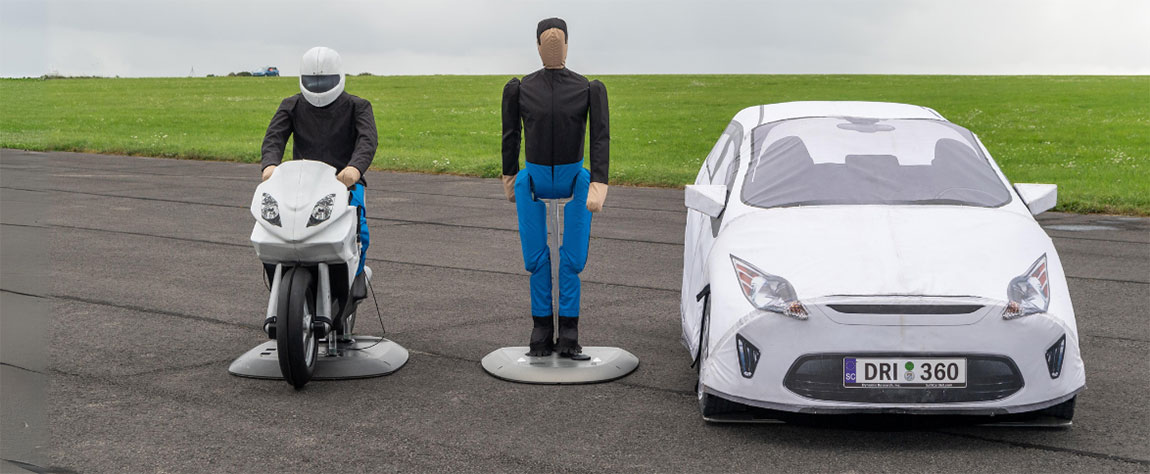
Ground Traffic Control (GTC) verwaltet komplexe Testszenarien durch die zentrale Überwachung, Steuerung und Koordinierung des Verkehrs auf der Teststrecke, einschließlich VRU-Plattformen, GSTs sowie fahrerloser und von Menschen gesteuerter Fahrzeuge.
Durch ihre Vielseitigkeit ist diese Software ideal für eine Vielzahl von Fahrversuch-Anwendungen, z. B. für Dauerlauf- und missbräuchliche Nutzungstests sowie für Tests von Autobahnszenarien mit mehreren Fahrzeugen. Um die Sicherheit in gemischten Verkehrsszenarien zu gewährleisten, ist das System mit einer Kollisionserkennung und -vermeidung ausgestattet, die robotergesteuerte Fahrzeuge abbremst und menschliche Fahrer warnt. GTC verbessert die Produktivität und die Zusammenarbeit durch eine anpassbare Benutzeroberfläche, die Unterstützung mehrerer Bildschirme und rollenbasierten Zugriff.
GTC ist ein revolutionäres System für die Verwaltung und Umsetzung fahrerloser Anwendungen für Dauerlauf- und missbräuchliche Nutzungstests sowie komplexer Multi-Fahrzeug-Testszenarien. Zu den Hauptfunktionen gehören:
Echtzeit-Überwachung von Fahrzeugen und anderen Testobjekten von mobilen und festen Basisstationen aus
Überwachung von Position, Kurs und Geschwindigkeit des Fahrzeugs durch das GNSS-Kollisionserkennungssystem, um Kollisionen automatisch zu vermeiden
Einfache Einrichtung von Geofencing-Bereichen, die so angepasst werden können, dass sie ein bestimmtes Fahrzeugverhalten innerhalb der virtuellen Grenzen auslösen
Unterstützt mehrere Benutzer mit Bediener- und Anzeigerechten
Ideal für fahrerlose Dauerlauf- und missbräuchliche Nutzungstests sowie komplexe Schwarmtests mit mehreren Fahrzeugen
Kompatibel mit AB Dynamics Systemen wie Fahrrobotern, Flex-0, LaunchPad und GST Produkten
"*" indicates required fields
Eine tragbare und benutzerfreundliche Fernsteuerung für ADAS-Tests.
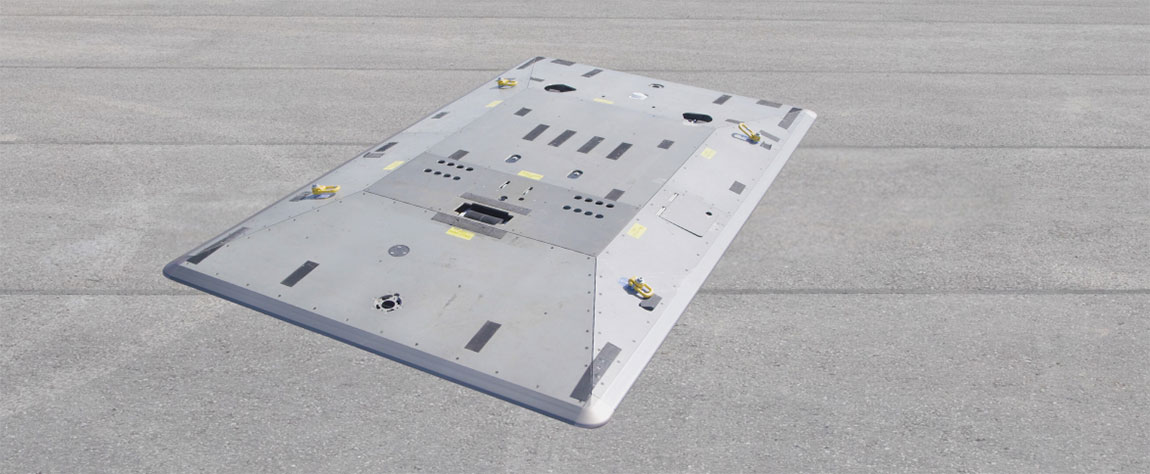
GTC Remote ist eine drahtlose Fernsteuerung für die Bedienung unserer GST und LaunchPad ADAS-Plattformen, einschließlich des neuesten LaunchPad Spin. Sie ist für den Einsatz bei ADAS-Tests mit einer einzelnen Plattform konzipiert, z. B. für Fußgänger- und Radfahrertests, bei denen nur eine Plattform benötigt wird.
GTC Remote besteht aus einem Handgerät mit Joystick-Funktion sowie einem Display, einem Funkgerät, einer Sicherheitssteuerung und der Software der Basisstation. Dadurch entfällt die Notwendigkeit, mehrere Hardwarekomponenten zu verwenden, was die Einrichtung und den Betrieb der Tests vereinfacht.
GTC Remote wurde entwickelt, um die Testeffizienz auf der Strecke zu verbessern. Sie ist ein vielseitiges, tragbares und zuverlässiges Tool, das Ihre ADAS-Testmöglichkeiten erweitert und gleichzeitig das bewährte AB Dynamics Sicherheitskonzept beibehält. GTC Remote macht es einfacher als je zuvor, Testszenarien einzurichten und durchzuspielen, und bietet eine Reihe von Vorteilen:
Eine Benutzeroberfläche mit vereinfachten und optimierten Workflows
Ein benutzerfreundliches, ergonomisches Design mit einem robusten, gewichtsbalancierten Gehäuse
Getestet nach IPX4, mit Feuchtigkeitsschutz
Ein Sieben-Zoll-Farb-Touchscreen zur einfachen und effizienten Überwachung und Steuerung der Plattformen
Ein leistungsstarker Prozessor und ein ausdauernder Akku für den ganztägigen Einsatz
Eine flexible Funkoption für die Nutzung unserer bestehenden Funkfunktionen, wie das TrackFi PowerMesh der neuesten Generation, oder eines anderen bevorzugten Kommunikationsnetzwerks
CE-, FCC- und UKCA-Zertifizierung
"*" indicates required fields
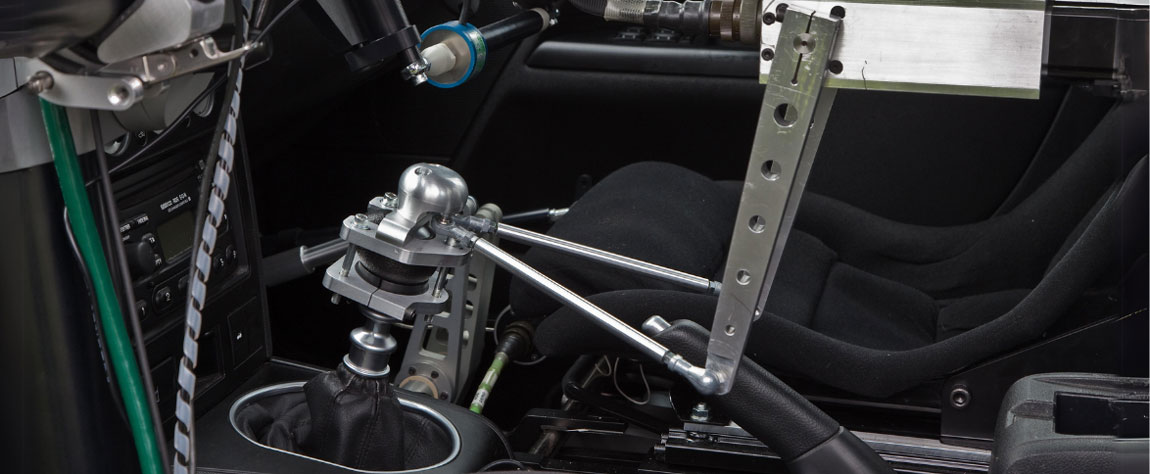
Eine schnelle, sichere und anpassbare Montagelösungen für weiteres Messezubehör und unseren Schaltroboter.
Unsere Montagestützen ermöglichen den schnellen und steifen Einbau von Messzubehör wie z. B. Kreisel- und Beschleunigungssensoren sowie GNSS-Trägheitsplattformen in ein Fahrzeug. Wir bieten maßgeschneiderte Halterungen in einer Vielzahl von Konfigurationen für das Anbringen von Geräten. Auch der Schaltroboter kann mit der Montagestütze im Fahrzeug befestigt werden.
Die Standardstütze lässt sich schnell zwischen Fahrzeugboden und -dach einbauen, für Fahrzeuge mit Panoramaglasdach ist ein optionales Kit verfügbar. Der einzigartige, klappbare Bogenfuß der Stütze ermöglicht die Überbrückung von Übertragungstunneln und gewährleistet maximale Giersteifigkeit. Die Montagestütze weist keine Schwingungsmodi unter 50 Hz auf und kann dank eines Federvorspannungsmechanismus Beschleunigungen, Stöße und die Durchbiegung der Fahrzeugkarosserie verkraften.
"*" indicates required fields
Sie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr Informationen