English
English  German
German  Japanese
Japanese Path following, a technology first developed by AB Dynamics in 2001, is now well known and in use globally for tests such as the ISO lane change and a raft of ADAS standards. What may be less widely understood is how it can help with many other tests which are not defined in terms of a trajectory to follow. Here we will look at the path following lead-in and how it can help with testing in constrained spaces.

Most objective vehicle dynamics testing is performed on a track called a VDA, which stands for Vehicle Dynamics Area. If the VDA is only just large enough to fit a test in, it can be critical to start the test at the right point on the track, and at the required heading angle. This can be difficult for human drivers, especially at speed.
The RC software includes a number of options for starting a test. As well as manually triggering using the start button, a test can be initiated based upon a wide range of external triggers such as vehicle speed or GPS time. Path following lead-in is effectively a further option, where the steering robot automatically guides the vehicle to the desired location before automatically starting the test itself. This ensures positioning and heading accuracy far in excess of what a human could achieve.
An example where this was used is a sine-sweep test performed on VDA A at IDIADA in Spain. This comprises of a sinusoidal (sine wave) steering input whose frequency and amplitude vary through the test to assess a vehicle’s lateral response at different frequencies.

The track used at IDIADA, Spain. The test duration meant that both the entry and exit roads from the VDA were required.
If a test driver was doing this test by hand, they would make small adjustments to the sinusoid to keep the vehicle on the track. This is a skilled driving input which takes a lot of practice, but the resultant data would not be as good as the perfect sinusoidal input that the robot can generate. Using a robot guarantees a perfect blended sinusoid but fitting the manoeuvre onto the test track can be a challenge. Hence, using a path-following lead-in gives you the best of both worlds – perfect data even when testing in confined spaces.
Once the appropriate starting position had been found allowing the test to be run in full within the available space, a path was created which led up to this spot. The driver simply positioned the vehicle further down the track and allowed the robot to guide the vehicle onto the path and up to the starting position, whereupon path following ceased and the sinusoidal playout was triggered automatically. This could be repeated as many times as necessary without requiring any further skilled input from the test driver.
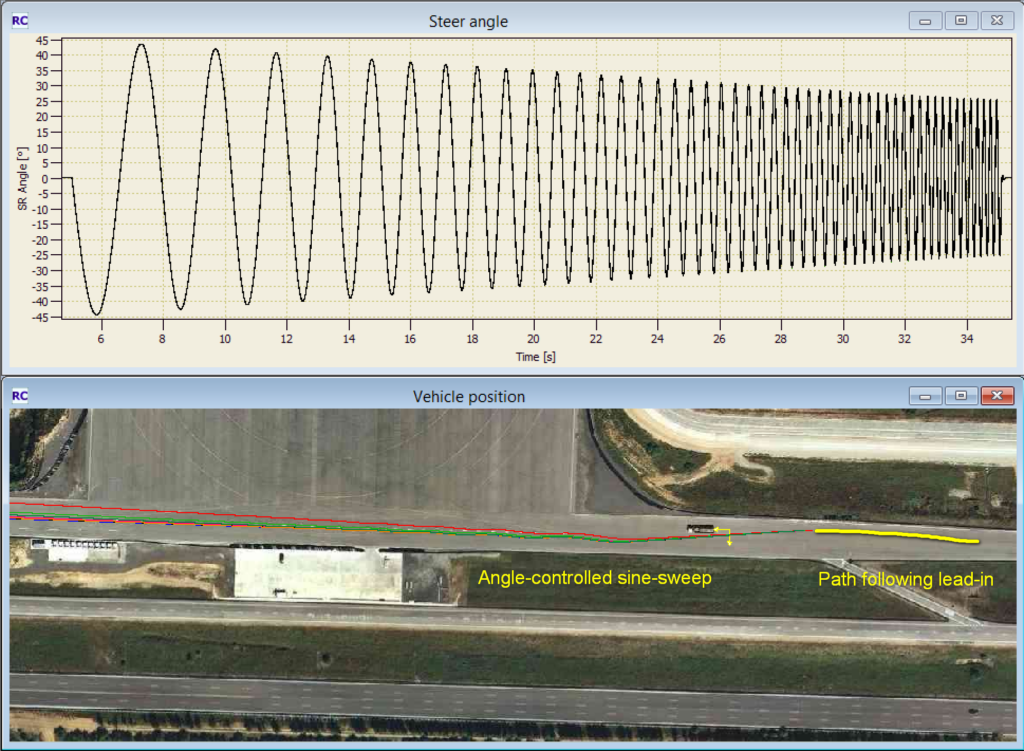
7 runs of data. The top graph shows the angle-controlled part of the test, demonstrating the perfect control and repeatability. The lower picture shows the test track and the motion of the vehicle, as well as showing the path following lead-in used.
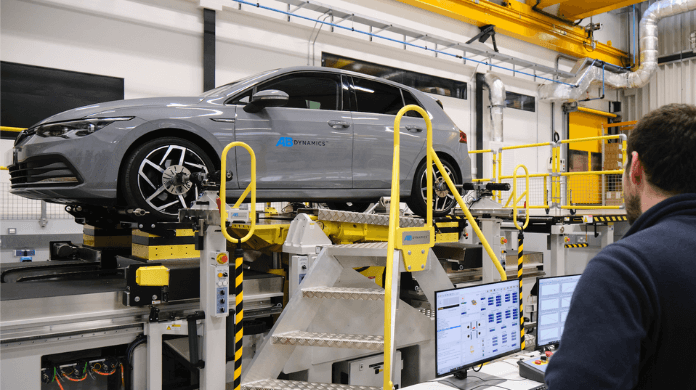
A steering robot with path-following was used for this testing, as well as an accelerator robot to maintain the correct speed. The path following lead-in function is part of the PF Vehicle Dynamics software module.
Read more about how path following and is used in ADAS testing, vehicle dynamics and durability testing.