 English
English  German
German  Japanese
Japanese 
新车评价规程(NCAP)测试
我们的解决方案提供了在开发过程中挑战安全系统所需的灵活性,同时还为高效的 NCAP 测试提供了自动化工作流程。
什么是 NCAP?
新车评价规程(NCAP)是一项已被全球采纳的计划,旨在促进和奖励汽车安全。NCAP 为消费者提供公正的汽车安全信息,鼓励制造商提高安全性能,并影响消费者的选择。评估车辆的依据是其在主动和被动安全性能方面的表现。NCAP 计划已扩展到欧洲和美国,同时澳大利亚、新西兰、拉丁美洲、日本、韩国、中国以及近期的印度也在实施该计划。
行人
我们的测试解决方案如何帮助您保护行人
自动紧急制动系统(AEB)可以通过干预来防止碰撞,从而保护行人免受注意力不集中的驾驶者的伤害。NCAP 测试要求在各种场景下对这些系统进行测试,包括行人从车辆前方穿越道路、同方向行走、穿越车辆正在转入的道路以及在倒车时位于车辆后方。移动方式如人类走路一样的目标被用作代替真人的安全代用物。我们为行人测试提供了一系列选择,包括欧洲 NCAP 核准的 Soft Pedestrian 360 目标,用于准确地复制人体动作。我们的驾驶机器人、目标搭载平台和无线遥测系统可确保在试验场进行精确、可靠的 NCAP 合规测试和数据传输。





各地区的测试:




自行车骑手
我们如何能够为自行车骑手测试提供支持
自行车骑手是最易受伤害的道路使用者。NCAP 测试通过评估自动紧急制动系统(AEB)和自动紧急转向系统(AES)侦测和避免与自行车骑手发生碰撞的能力,在提高自行车骑手安全方面发挥着至关重要的作用。为了评估这些系统的性能,我们提供了用于测试车辆的驾驶机器人,其可保证输入的精确性和一致性。
我们还提供一系列适合从简单到复杂的各种测试场景的 ADAS 平台。我们的机器人控制器(RC)软件还配备了一个预设测试场景库(更新至 2023 年),为对当前所有欧洲 NCAP ADAS 协议进行自动测试提供便利。




各地区的测试:
摩托车骑手
我们如何能够为摩托车测试提供支持
摩托车和踏板车在城市地区越来越受欢迎,但它们涉及的致命和严重交通事故的比例却很高。
欧洲 NCAP 已经包括了一些摩托车测试场景,但计划通过提高车速、纳入商用货车测试场景及其辅助驾驶评估来进一步发展这些测试,全球其他 NCAP 可能会效仿这一做法。
我们已创建了专门设计用于支持摩托车测试所需更高车速的 ADAS 目标和平台,其中包括欧洲 NCAP TB 029 列出的 DRI Soft Motorcycle 360 和 LaunchPad 80。



各地区的测试
车辆乘员安全
我们如何能够为车辆对车辆和车道支持系统(LSS)测试提供支持
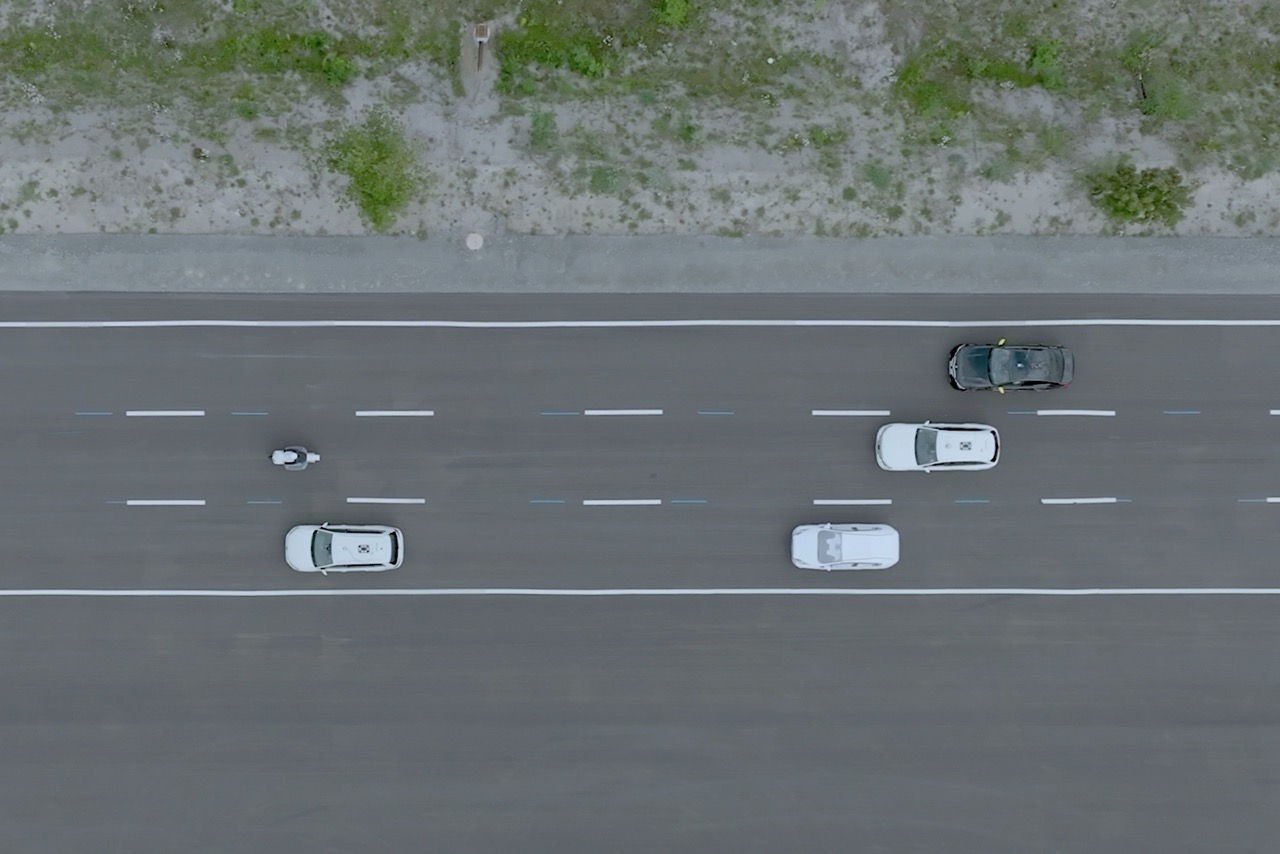
车辆乘员安全包括车辆对车辆和 LSS NCAP 类别。车辆对车辆测试场景评估自动紧急制动系统(AEB)和前撞预警系统(FCW),旨在通过侦测碰撞和应用制动来预防事故。
车道支持系统包括车道偏离警告系统(LDW)、盲点监测系统(BSM)、车道保持辅助系统(LKA)和紧急车道保持系统(ELK),这些系统利用各种技术使车辆保持在车道内行驶并发出危险警告,从而增强乘员的安全。AB Dynamics 为这些系统提供全面的测试解决方案,提供的产品包括用于精确控制测试车辆的驾驶机器人,以及用于精确和可重复测试的坚固 ADAS 目标和平台。



各地区的测试
重型车辆
我们如何支持您的重型车辆测试
为了提升重型商用车的安全性和技术性能,进行全面而精确的测试至关重要。尤其考虑到重型车辆在全球交通事故死亡率中所占比例过高的情况。
在 AB Dynamics,我们提供一系列适用于重型车辆的无人驾驶机器人、VRU 目标和平台。因此,卡车制造商可以使用我们经过验证的 ADAS 测试解决方案,提升车辆安全性并确保符合新的消费者测试和监管标准。



按地区划分的测试:
测试库
测试库
我们 RC 软件的一个重要功能是可提供用于 NCAP 测试的特殊群组。特殊群组是一个综合测试库,其中包含为欧洲 NCAP、中国 NCAP 等预先配置的测试场景。
它们可实现自动测试,其中包括涉及驾驶机器人和/或 ADAS 平台的所有当前欧洲 NCAP ADAS 协议。欧洲 NCAP 特别群组库中目前有 600 多个不同的测试案例,涵盖各种速度和偏移量,其中包括为最新 2023 年协议更新而添加的 150 个新场景。这些测试会根据车辆尺寸自动配置以确保最高的准确性,结构化的测试列表可管理必要测试和所需测试条件的执行和跟踪。测试数据还可以方便地导出,并使用 RC 中的特殊群组后处理器生成报告。
通过使用特殊群组,操作人员可以节省数月的封闭场地测试和规划时间。

辅助驾驶
欧洲 NCAP 辅助驾驶评级
欧洲 NCAP 辅助驾驶评级对车辆辅助驾驶系统的性能进行评估。该评级计划于 2020 年推出,重点关注辅助能力(车辆辅助与驾驶员参与之间的平衡)和安全备份。车辆被评为“入门”、“中等”、“良好”或“优秀”。2024 年,欧洲 NCAP 对其辅助驾驶评级系统进行了更新,新增了 40 项封闭场地测试。
辅助驾驶系统通常是可选项,不包括在欧洲 NCAP 星级评定中,但两者将在 2026 年相关联,并于 2029 年完全整合。
为了提高测试效率,AB Dynamics 通过最新版机器人控制器(RC)软件中的可配置测试组,实现了 2024 辅助驾驶协议中所有相关测试的自动化。它允许用户快速、简单地创建欧洲 NCAP 辅助驾驶协议中包含的所有新测试。
Synchro 则进一步增强了测试功能,其通过计算轨迹并使测试车辆与高级驾驶辅助系统(ADAS)目标同步,简化了诸如切入等复杂机动场景。
我们的软件解决方案能够协调场景中的所有“角色”,包括机器人控制的车辆以及高级驾驶辅助系统(ADAS)目标,从而通过单一产品生态系统全面界定和执行测试协议。
在我们的帮助下达到 NCAP 测试的要求
"*" indicates required fields

You need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More Information