 English
English  German
German  Japanese
Japanese 
无人驾驶耐久性和滥用测试
消除驾驶员风险、提高效率并改善测试数据质量。
什么是无人驾驶耐久性和滥用测试?
耐久性和滥用测试是了解车辆性能不可或缺的一部分。耐久性测试的目的是加速车辆部件磨损,通常需要在粗糙路面上反复行驶。而滥用测试则是为了探究车辆在极端情况下会发生什么,例如驶入沙堤或驶过斜坡后悬空。
耐久性和滥用测试项目是非常艰苦的体力劳动,而且具有潜在的危险性,由于每个驾驶员所能承受的测试时间有限,往往需要庞大的驾驶员团队。这就是我们提供无人驾驶解决方案的原因,它不仅能消除测试驾驶员疲劳或受伤的风险,还可提供可重复性、准确的速度和路径跟随。
我们的无人驾驶耐久性和滥用解决方案
AB Dynamics 的无人驾驶解决方案利用驾驶机器人、软件、遥测技术和精密控制器安全地进行这些测试,使驾驶员脱离车辆。它消除了驾驶员的风险,加快了测试速度,提高了测试结果的准确性和可重复性。
我们的无人驾驶解决方案由三个关键要素组成:无人驾驶车辆、基站和通信网络。此外,还可选配基于光检测和测距(LiDAR)和摄像头的主动碰撞侦测系统,用以侦测和避让封闭测试场地上的非追踪对象。
下载手册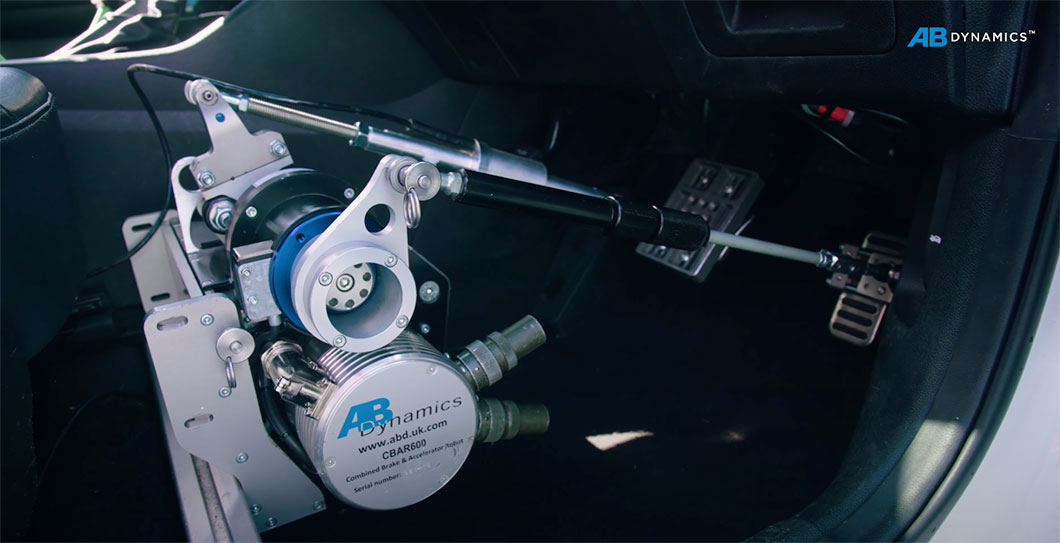
You are currently viewing a placeholder content from YouTube. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More Information无人驾驶车辆
长时间在粗糙路面上驾驶会对人类驾驶员的健康产生累积性影响。在我们的解决方案中,车辆可通过踏板、转向和换挡机器人进行机械驱动,或通过我们的 Flex-0 CAN 控制系统进行线控,从而实现无人驾驶。机器人驱动和线控解决方案都能对车辆的位置、方向和速度进行精确控制,确保可重复性和数据的准确性。

基站
基站是操作员使用 AB Dynamics 简单易用的地面交通控制(GTC)软件对车辆进行编程、管理和控制的地方。耐久性测试驾驶员能够逐渐觉察到封闭测试场地上最令人不适的特征位置,并有意避开它们。然而,我们的无人驾驶解决方案避免了这一问题,因为车辆测试路线是使用我们的路径跟随软件创建并加以执行。它利用全球导航卫星系统(GNSS)校正运动组件的实时反馈,为驾驶机器人或 Flex-0 提供输入,用以精确引导车辆沿指定路径行驶。

通信网络
该系统利用高性能网状无线电网络提供可靠的车辆对车辆、车辆对基站的数据传输。网络安全通过加密得到保证,同时网络可以通过固定基础设施建立,也可以使用移动节点在任何地方进行测试。

主动式车载物体侦测
该解决方案可升级为主动式障碍物侦测系统,利用光检测和测距(LiDAR)以及结合传感器的摄像头。该系统会在无人驾驶车辆的行驶路线受阻时让车辆停下来,并带来更多获益:
- 侦测未被追踪的物体,例如野生动物或车辆碎片,防止测试车辆受损
- 在基站视线之外的大面积区域安全操作无人驾驶车辆
- 在监控多辆无人驾驶车辆时减少操作员的工作量,由于每辆车的车载自动驾驶能力都有所提高,从而增加了一个团队可安全操作的车辆数量









是否需要讨论您的耐久性和滥用测试要求?
"*" indicates required fields
